قوانين نيوتن
-
1. vecteur position
- le mouvement des objets est "relatif", c'est-à-dire qu'il est lié à un objet de référence, le référentiel , qui est choisi, donc lors de l'étude d'un objet spécifique, nous choisissons un repère d’espace
 et un autre pour le temps que l'on associe
au référentiel.
et un autre pour le temps que l'on associe
au référentiel. Puisque G est mobile, l'ensemble des positions successives de G dans le temps est le "chemin" du point G (la trajectoire de G).
- En étudiant le mouvement d'un corps solide dans un référentiel, on se borne au mouvement de G, son centre d'inertie, qui permet de connaître son mouvement total.
- On marque un point mobile d'un corps solide au moyen d'un vecteur formé entre le centre du trait et et la position de l'objet mobile à l'instant t. Il est appelé vecteur position
 son expression
son expression
où (
 )
est appelées les coordonnées de vecteur-position
)
est appelées les coordonnées de vecteur-position 2. La vitesse instantanée est
2.1. définition
Dans un référentiel donnée,
 est le vecteur vitesse instantanée de G centre de inertie d'un corps solide à un instant t, égal au la dérivée du vecteur position
est le vecteur vitesse instantanée de G centre de inertie d'un corps solide à un instant t, égal au la dérivée du vecteur position  par rapport au temps au même instant t, on écrit donc :
par rapport au temps au même instant t, on écrit donc :  , et son unité dans le SI est :m/s
, et son unité dans le SI est :m/s2.2. Coordonnées de vitesse instantanée
 =
=  =
= 
 représente les mises à jour instantanées de la vitesse
représente les mises à jour instantanées de la vitesse 
2.3. Module (Norme) de vitesse instantanée :

3. Le vecteur d'accélération instantanée :
3.1. Définition :
Dans un repère donné, le vecteur accélération instantanée
 du centre d'inertie G d'un corps solide, à un instant t ,est égal à la dérivée du vecteur vitesse par rapport au temps à la même instant, on écrit donc :
du centre d'inertie G d'un corps solide, à un instant t ,est égal à la dérivée du vecteur vitesse par rapport au temps à la même instant, on écrit donc :  , et son unité dans le SI est: m/s< sup>2
, et son unité dans le SI est: m/s< sup>23.2. Coordonnées du vecteur d'accélération instantanée dans un repère cartésien :
 =
= 
 représente le vecteur d'accélération instantanée
représente le vecteur d'accélération instantanée 
3.3. Module (Norme) de vecteur d'accélération instantanée dans un repère cartésien :

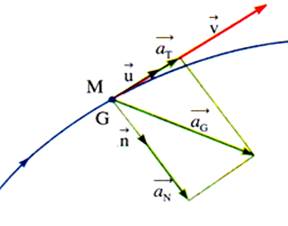
3.4. Coordonnées du vecteur d'accélération instantanée dans le repère FRENET :
* Repère FRENET G(
 ;
;  ): est un repère orthogonal et régulier, dont l'origine coïncide à chaque instant avec la position du mobile :
): est un repère orthogonal et régulier, dont l'origine coïncide à chaque instant avec la position du mobile :  : tangente à la trajectoire dans le même sens que le mouvement : "tangente unilatérale vecteur"
: tangente à la trajectoire dans le même sens que le mouvement : "tangente unilatérale vecteur" : perpendiculaire à
: perpendiculaire à  et dirigé vers le centre de l'arc : "le vecteur normal unitaire"
et dirigé vers le centre de l'arc : "le vecteur normal unitaire" 
-
 : vecteur accélération tangentielle :
: vecteur accélération tangentielle : 
-
 : vecteur accélération régulation :
: vecteur accélération régulation :  avec
avec  : le rayon de courbure de la chemin à la position donnée .
: le rayon de courbure de la chemin à la position donnée .* Coordonnées du vecteur d'accélération instantanée dans la caractéristique de Phryne
4. Lois de Newton
Première loi de Newton, principe d'inertie
Dans un repère galiléen, si la somme des forces extérieures appliquées à un corps solide est égale à un vecteur nul
 , le vecteur vitesse
, le vecteur vitesse  du centre d'inertie G du corps solide est constant. En revanche, si le vecteur vitesse du centre d'inertie du corps solide est constant
du centre d'inertie G du corps solide est constant. En revanche, si le vecteur vitesse du centre d'inertie du corps solide est constant  , alors la somme des les forces extérieures appliquées au corps est un vecteur nul.
, alors la somme des les forces extérieures appliquées au corps est un vecteur nul. Deuxième loi de Newton. Loi fondamentale de l'animation
Dans un repère galiléen, la somme des forces extérieures appliquées à un corps solide est égale au produit de la masse de ce corps par le vecteur-accélération de son centre d'inertie G :
 ".
". Remarque : La deuxième loi de Newton n'est appliquée que dans un référentiel galiléenne
Troisième loi de Newton : principe des interactions
" Nous considérons deux corps A et B sont en interactions , soit
 la force appliqué par (A ) sur(B) et
la force appliqué par (A ) sur(B) et
 la force que (B) applique à (A).
Que les deux corps soient en mouvement ou au repos,
les deux forces et
la force que (B) applique à (A).
Que les deux corps soient en mouvement ou au repos,
les deux forces et  Vérifier l'égalité :
Vérifier l'égalité :  ".
". 5. Mouvement rectiligne uniformément variable
Définition du mouvement rectiligne uniformément variable
le centre d'inertie d'un corps solide G est en mouvement rectiligne uniformément variable, si :
- le chemin de G est une droit
-
 Le vecteur accélération du point G est constant pendant le mouvement
Le vecteur accélération du point G est constant pendant le mouvement 
Remarque :
* si
avec  : le mouvement de G est rectiligne uniformément accéléré.
: le mouvement de G est rectiligne uniformément accéléré. * si
avec  : un mouvement de G est rectiligne uniformément ralenti .
: un mouvement de G est rectiligne uniformément ralenti . Équations temporelles du mouvement rectiligne uniformément variable
Considérons un corps S en mouvement rectiligne uniformément variant dans
 ,
, marquerons la position de son centre d'inertie G à chaque instant par :
 avec
avec 


A t=0 aller à une vitesse initiale



A t=0 l'objet part d'une position

Relation indépendante du temps
On considère un corps S dans un mouvement rectiligne uniformément variable, à un instant tA passe par la position A d'abscisse
 avec la vitesse
avec la vitesse  pour atteindre la position B d'abscisse
pour atteindre la position B d'abscisse  avec la vitesse
avec la vitesse 
En excluant le temps t entre les deux équations, on obtient une relation appelée relation indépendante du temps, qui est :

Remarque :
Cette relation ne doit pas être utilisée directement.
6. Le théorème de l'énergie cinétique :
Dans un repère galiléen, la variation d'énergie cinétique d'un corps solide indéformable en déplacement, entre deux moments, est égale à la somme algébrique du travail de toutes les forces extérieures appliquées sur le corps entre ces deux moments.
