تقديم مجموعات ميكانيكية متذبذبة
1. Définitions :
Un système mécanique oscillant est un système qui effectue un mouvement de va-et-vient périodique autour de sa position d'équilibre stable
Un mouvement périodique est un mouvement qui se répète à des intervalles de temps égaux
Le mouvement oscillatoire libre est le mouvement oscillatoire effectué par un oscillateur mécanique sans gagner d'énergie d'une source externe une fois son mouvement établi.
2. Oscillateurs mécaniques :
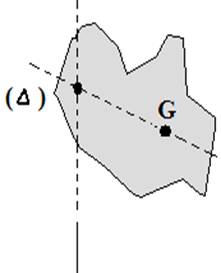
2.1. Pendule Pesant :
* C'est tout système indéformable et peut effectuer un mouvement oscillatoire autour d'un axe fixe sous l'influence de son propre poids.
* nous marquons le mouvement avec l'abscisse angulaire θ.
* On caractérise le groupe par son moment d'inertie J(Δ)
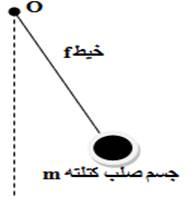
2.2. Pendule Simple :
* C'est un objet ponctuel de masse m, qui oscille à une distance L d'un axe fixe
* Réalisable en suspendant un petit corps (une petite masse) à une extrémité d'un fil non extensible de masse négligeable
* nous marquons le mouvement avec l'abscisse angulaire θ.
* On caractérise le système par le longueur de fil L et la masse du corps m
2.3. Pendule Élastique (flexible):
* C'est un groupe constitué de corps solide et un ressort de masse négligeable aux enroulements épurés (spires non reliées , intermittente)
* Le corps rigide est fixé à une extrémité du ressort et l'autre extrémité du ressort est reliée à un support fixe.
* nous marquons le mouvement avec l'abscisse linéaire x.
* Le système se caractérise par la raideur du ressort k et la masse du corps m

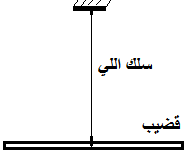
2.4. Pendule de Torsion
C'est un dispositif constitué d'un fil métallique fixé par une extrémité à un support stable, et par l'autre extrémité à une tige homogène suspendue à son centre d'inertie
* Le mouvement est défini par l'abscisse angulaire θ
* Le système est caractérisé par le moment d'inertie de la tige JΔ et la constante de Torsion du fil C
3. Caractéristiques du mouvement oscillatoire :
3.1. La position d'équilibre stable :
C'est la position à partir de laquelle, si l'oscillateur bouge, il revient s'y installer.
3.2. Amplitude du mouvement:
L'amplitude de mouvement d'un oscillateur mécanique libre et non amorti est la valeur positive maximale de la distance x ou l'angule θ entre l'oscillateur et sa position d'équilibre.
3.3. période propre :
Le période propre T0 d'un oscillateur mécanique libre et non amorti est l'intervalle de temps séparant deux passages successifsde l'oscillateur, par la même position (ex : par son position d'équilibre stable) dans le même sens
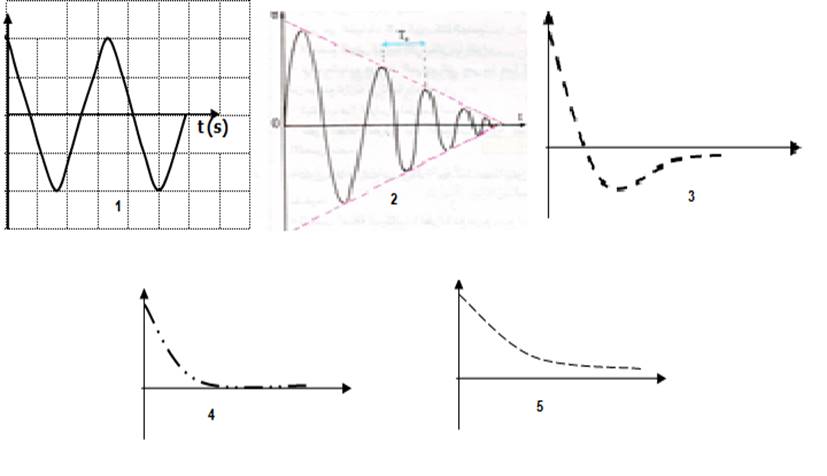
4. régimes d'amortissement mécanique :
4.1. Définition :
Nous appelons 'amortissement mécanique' le phénomène de la diminue progressivement avec le temps, de l'amplitude de mouvement d'un oscillateur, jusqu'à qu'il s'arrête à son position d'équilibre stable (extinction).
Et ceci est du a un frottement fluide ou solide.
4.2. Cas de l'absence de l'amortissement
Le régime périodique idéal dans lequel l'amplitude des oscillations reste constante avec le temps (1)
4.3. Cas de l'amortissement légère
Le régime quasi-périodique en ce sens que l'amplitude des oscillations décroît avec le temps jusqu'à l'extinction (2)
4.4. Cas de l'amortissement aiguë
Le régime sous-critique où l'oscillateur effectue une oscillation avant de s'arrêter. (3)
Le régime critique dans lequel l'oscillateur revient à sa position d'équilibre après en avoir été retiré sans oscillation (4)
Le régime supercritique car il faut beaucoup de temps aux oscillateur pour atteindre sa position d'équilibre sans osciller. (5)